




The miniaturization of LiDAR sensors, which once could only be carried by manned aircraft for large expanses of territory, now allows us to install them on regular remotely controlled drones for surveying areas of smaller size ranging from 5 to 400 hectares. In this regard, we use UAVs with electric propulsion, operated by personnel with appropriate certification and equipped with all necessary licenses and insurances to operate legally.
Thanks to the growing demand and the continuous improvement of the sensors in our inventory, since 2023 we have also been conducting surveys from helicopters with pilots. On board these helicopters, we install laser scanner devices, LiDAR, and high-resolution cameras for photogrammetry, thereby having the capability to cover areas from 400 to 10,000 hectares.
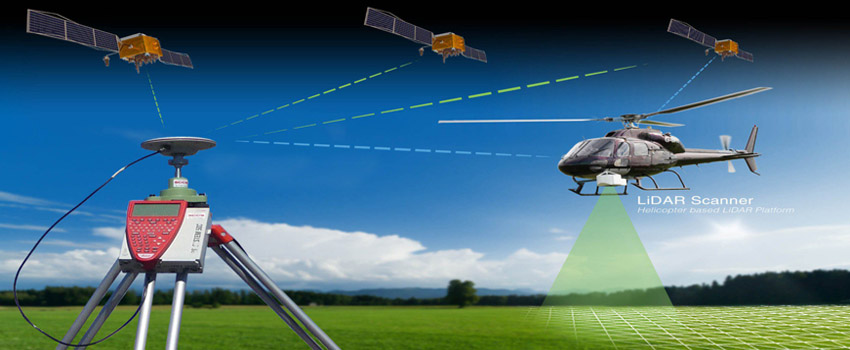
To ensure the final result's accuracy and to enhance the georeferencing of the data, we survey the entire project area and well-distributed Ground Control Points (GCP) using RTK-GNSS.
Flight planning is carried out using the "TOPOFLIGHT" software to maintain a consistent ground distance and, at the same time, a uniform point density and image resolution throughout the surveyed area.
The calculated points in the flight planning process are captured by the helicopter's navigation system, which the pilot uses for survey routes.
The project area is then flown over and scanned using a RIEGL VUX-120 laser scanner coupled with the Applanix APX-20 inertial navigation system, which records the position and solid angle, all integrated with a VQ-840-G bathymetric laser scanner, also via an APX-20.
The RIEGL VQ-840-G is a compact airborne laser scanner fully integrated for combined bathymetric and topographic surveying.
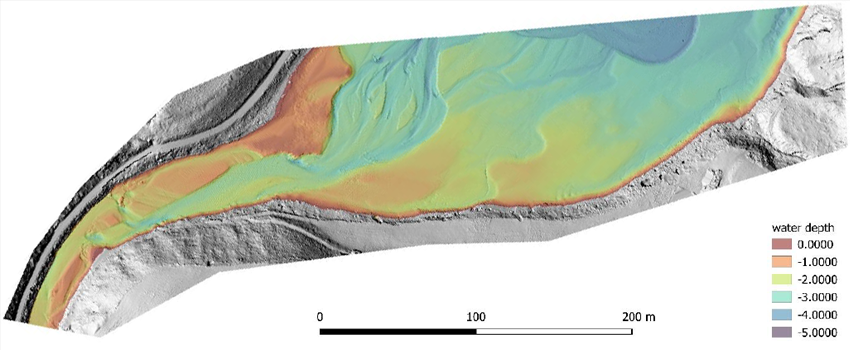
During the survey phase, the scanner measures distance for high-resolution underwater topography using a pulsed green laser beam with a focused spot. Depending on the water turbidity, this specific wavelength penetrates and submerges, allowing measurement of riverbed or seabed.
During flight, in addition to laser scanner measurements, nadiral photos are captured, and their capture points are recorded via GPS in a coordinate system consistent with the survey data.
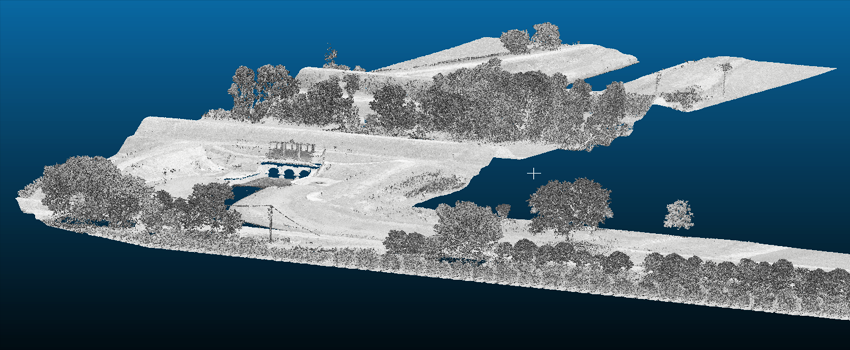
From the laser scanner data and flight trajectory, a 3D point cloud is recorded and derived.
Individual flight strips are executed to ensure adequate overlap, enabling a "strip adjustment" calculation on the trajectory provided by the IMU, aided by RiPRECISION software.
This allows for perfect alignment of individual scanning strips and provides a homogeneous point cloud. Dedicated software is used to classify the point cloud into "terrain" and "other" (e.g., towers, vehicles, vegetation, etc.).
The accuracy of the point cloud, both in planimetry and altitude, is +/- 2 cm above water and +/- 4 cm underwater.
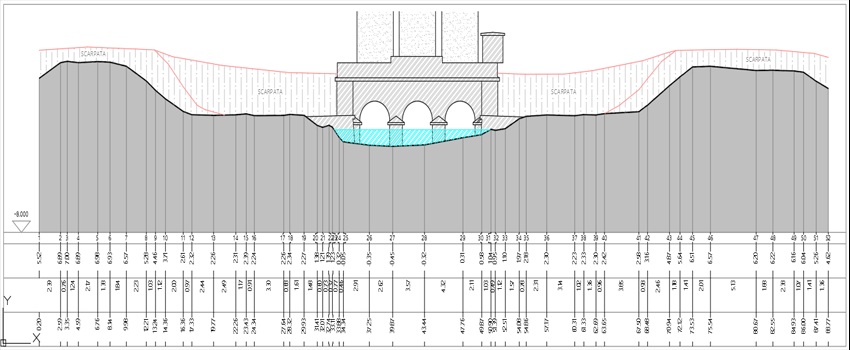
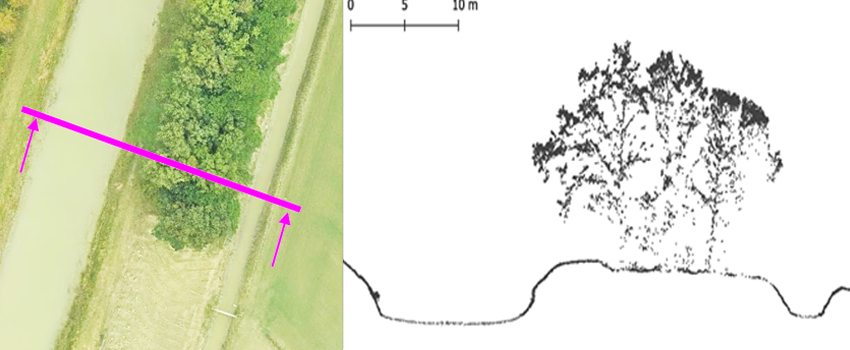
Unlike photogrammetric methods, a LiDAR sensor ("laser scanner") can measure ground points even in the presence of dense vegetation.
As a result, this method also generates a corrected digital terrain model of wooded areas and riverbeds and seabeds.