




La miniaturizzazione dei sensori LiDAR, che un tempo potevano essere trasportati solo da velivoli con pilota a bordo per grandi estensioni di territorio, oggi ci permette di poterli installare su normali droni radiocomandati per l’indagine/rilievo per aree di più modeste entità ricomprese tra i 5 e i 400 ettari.
A tal proposito utilizziamo UAV con propulsione elettrica, pilotati da personale munito di apposito brevetto e dotati di tutte le licenze e le assicurazioni necessarie per poter operare legalmente.
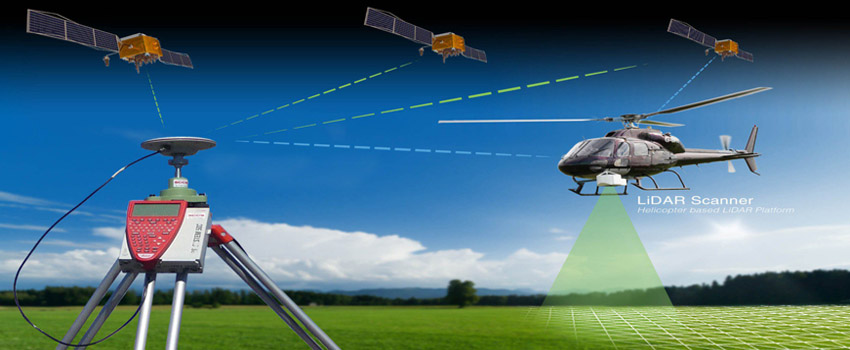
Grazie della crescita della domanda e al continuo miglioramento dei sensori in nostra dotazione, dal 2023 effettuiamo anche rilievi da elicottero con pilota, a bordo del quale sono installati apparati laser scanner, Lidar e fotocamere ad alta risoluzione per fotogrammetria avendo così la capacità di coprire aree da 400 a 10.000 ettari.
Per controllare il risultato finale e per aumentare l'accuratezza della georeferenziazione dei dati, rileviamo sull'intera area di progetto e ben distribuiti punti noti e GCP con RTK-GNSS.
La pianificazione del volo viene effettuata mediante il software "TOPOFLIGHT" al fine di ottenere una distanza dal suolo il più costante possibile ed allo stesso tempo una densità di punti ed una risoluzione delle immagini acquisite in modo omogeneo per l’intera area rilevata.
I punti calcolati nel processo di pianificazione del volo vengono acquisiti dal sistema di navigazione dell'elicottero, che il pilota utilizza per le rotte di rilievo.
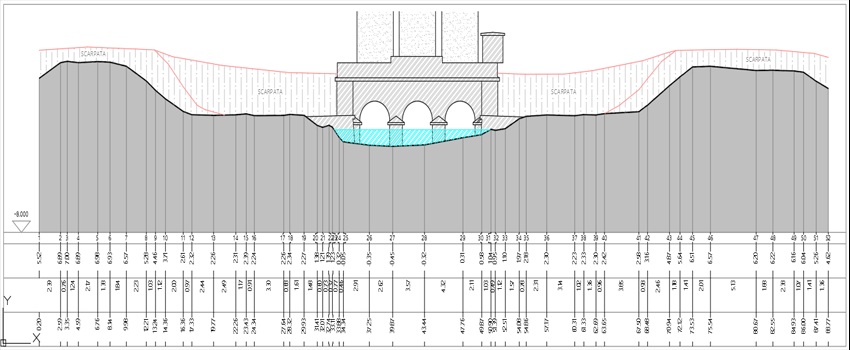
L'area di progetto viene quindi sorvolata e scansionata con un laser scanner RIEGL VUX-120 accoppiato al sistema di navigazione inerziale Applanix APX-20 che registra la posizione e l'angolo solido il tutto integrato da un laser scanner batimetrico VQ-840-G, sempre tramite un’APX-20.
Il RIEGL VQ-840-G è un laser scanner compatto per trasporto aereo e completamente integrato per il rilievo combinato batimetrico e topografico.
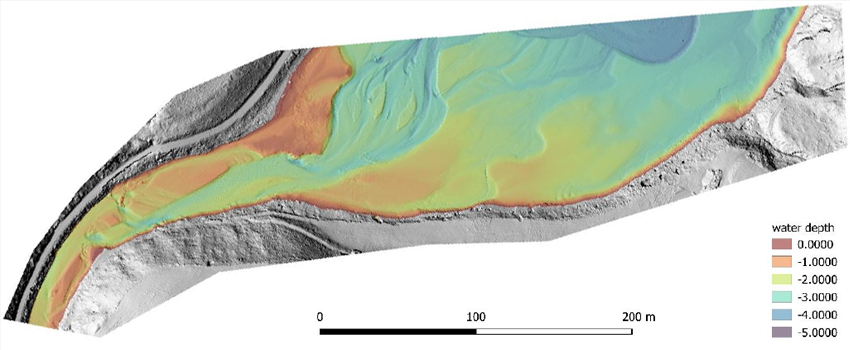
Nella fase di rilievo lo scanner esegue misure di distanza per una topografia subacquea ad alta risoluzione per mezzo di un raggio laser pulsato di colore verde e spot concentrato. In relazione al grado di torbidità dell’acqua, a questa particolare lunghezza d'onda il raggio penetra e immerge permettendo la misurazione del fondale fluviale o marino.
Durante il volo, oltre alle misurazioni laser scanner vengono acquisite foto nadirali delle quali, tramite il GPS ne vengono registrati i punti di presa nel sistema di coordinate uniforme ai dati rilievo.
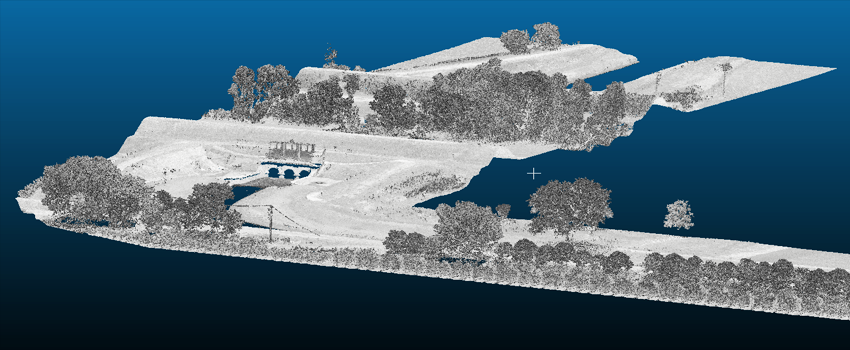
Dai dati del laser scanner e dalla traiettoria di volo viene registrata e ricavata una nuvola di punti 3D.
Le singole strisciate di volo eseguite in modo tale da avere una adeguata sovrapposizione per consentire di calcolare un “strip adjustment” sulla traiettoria fornita dall'IMU, con l’ausilio del software RiPRECISION,
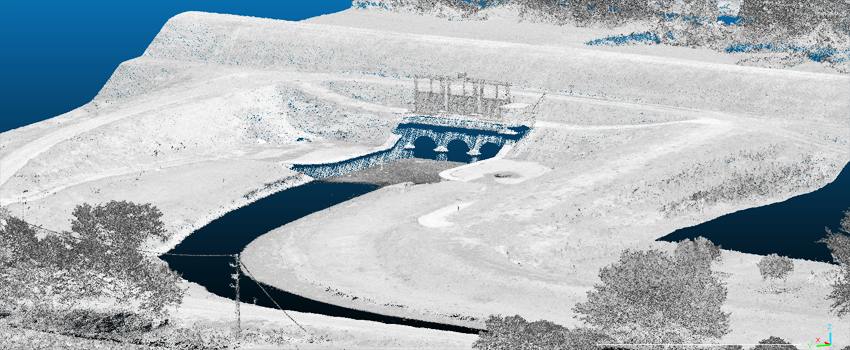
Questo ci permette di far combaciare perfettamente le singole strisciate di scansione e fornire una nuvola di punti omogenea. Un software dedicato viene utilizzato per classificare la nuvola di punti in "terreno" e "altro" (ad es. tralicci, veicoli, vegetazione, ecc.).
L'accuratezza della nuvola di punti sia in planimetria che in quota è di +/- 2 cm fuori acqua e +/- 4 cm in acqua.
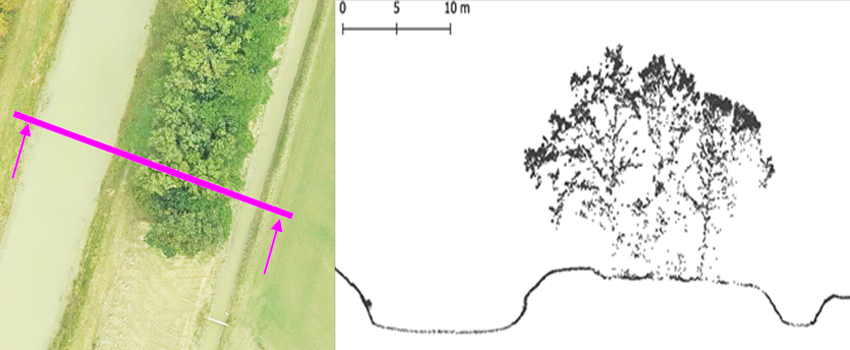
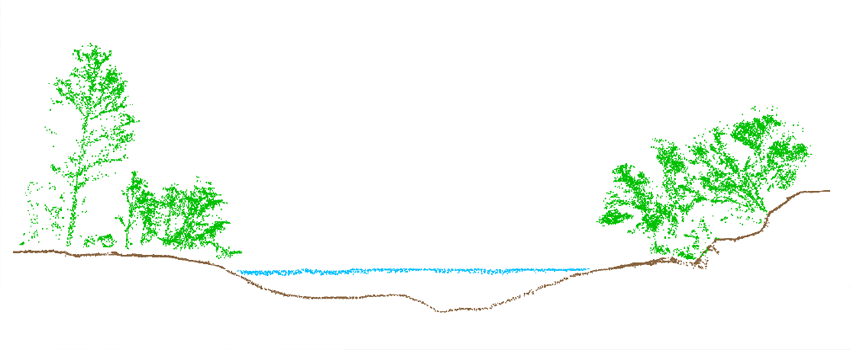
A differenza dei metodi fotogrammetrici, un sensore LiDAR (“laser scanner”) può misurare punti del terreno anche in presenza di fitta vegetazione.
Di conseguenza, questo metodo genera anche un modello digitale di terreno corretto delle aree boschive e dei fondali fluviali e marini.